Laser Facts #03: 3D sensing solutions (I)

Introduction to 3D vision sensing solutions
In order for autonomous systems or robots to work safely and efficiently in their environments, 3D vision is a key feature to integrate. Either for facial recognition, grasping objects or avoid obstacles, the sensors of an application need more and more to be able to detect and measure all elements in their surrounding, with a wide angle, enough speed and depth perception.
Different 3D vision sensing technologies using optics and lasers can be used depending on the main requirements, such as the following ones that we propose:
1- Stereo Vision
2- Structured light
3- Time of Flight (ToF)
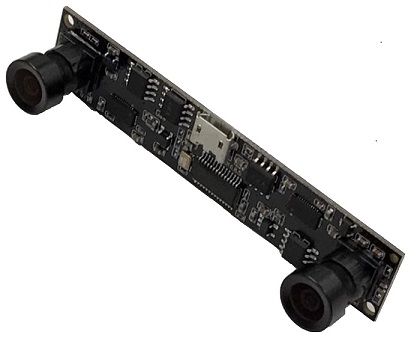
1) Stereo Vision
Stereo Vision uses a dual camera assembly that imitates human binocular vision. Both camera are disposed with a known angle and the images from both sides are then synthesized together. The distance of detected objects can be calculated through triangulation and render a 3D map of the whole field of view. Its great advantages are the avoidance of glare interference and its relative lower cost.
Range: depends on the camera lens performances.
Main applications: 3D cameras, AR/VR head mounted devices, Robotics
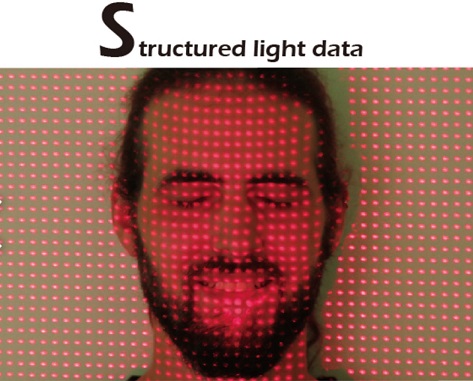
2) Structured Light
The principle of structured light is to associate a coherent light source ( LASER) with optics like DOE (Diffractive Optical Element) to produce specific patterns. The laser patterns required can be of random dots (speckle), dot matrix, array of lines or grids. Said pattern are projected onto objects, and a camera captures the image of the object's surface. When projected onto the object, the laser pattern of structured light is deformed from its original geometry. The difference is measured by the system which can then calculate the 3D shape of the encountered obstacle.
Range: 0.2 meters to 1.2 meters
Main Applications: Mostly for static scenes, such as face recognition, screen unlocking, payment verification, or the original Kinect sensor
... To be continued